世界に触れる

世界の輪郭
私が手を伸ばすと,あなたに触れます。
触れた手を通して,あなたは私から影響を受け取りますし,私にもその温もりと手触りを伝えます。
手の届く範囲の存在は,ある意味で世界とのUIです。 何故なら,私が世界に干渉し,影響を与えたという知らせを受け取れるからです。
ドアも,ガスコンロも,学校も,地図も,全て一種のUIです。 誰もが意識せずとも情報を瞬時に受け取ることができ,それに対し無意識裡に納得していることでしょう。
余儀の無い合意
私がたまに頭に載せているこれ,何だと思いますか?
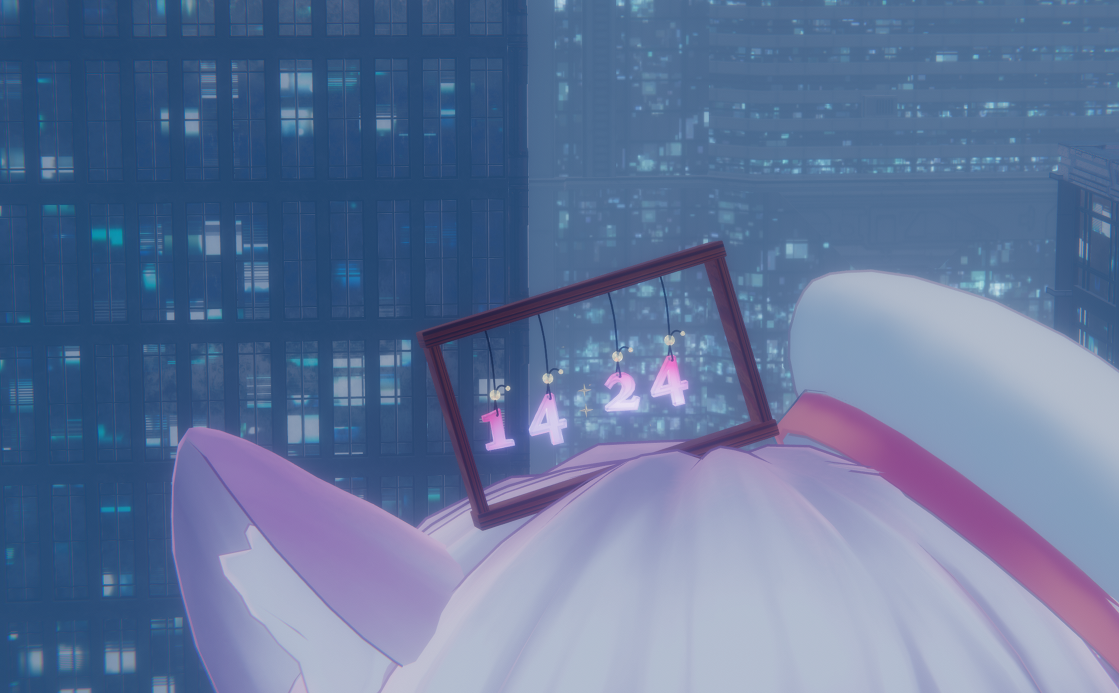
このように改まって訊かれたら,時計だと気づく人も多いかもしれません。 でも,何の文脈も無く「時計を載せているね」と気付いてくれた人は意外と少ないです。
本来の時計が丸いのは,時刻(のHH:MM:SSの部分)は \(S^1\) の形をしているからです。 もしかしたら日時計が先に存在して,時刻が後からその形に定まったのかもしれません。 でもそれは結局のところ,太陽の角度を一日見た時に,近似的には \(S^1\) の形をしていたからでしょう。
仮想空間でも時間は同様に進みます。 違う点として,仮想空間における時計が丸い必要はどこにもありません。球体でも星型でも,不定形でも良いですよね。 実際に,私の作った時計は吊り下がったガラス細工の形をしていて,時刻の変化に対して瞬時に反応します。
でも,人は私の時計から情報を無意識裡に受け取れませんでした。
この時計を常に見慣れていれば,いつの日にか時計だと即座に納得してもらえる日が来るかもしれません。
しかし現実のような強い物理的制約は,仮想空間においては,もはや存在しません。 物理的な制約無しに合意形成を達成できるのか,合意されるとしたらどのような形状なのか,これからが気になりますね。
他の例として,カラーピッカーがあります。
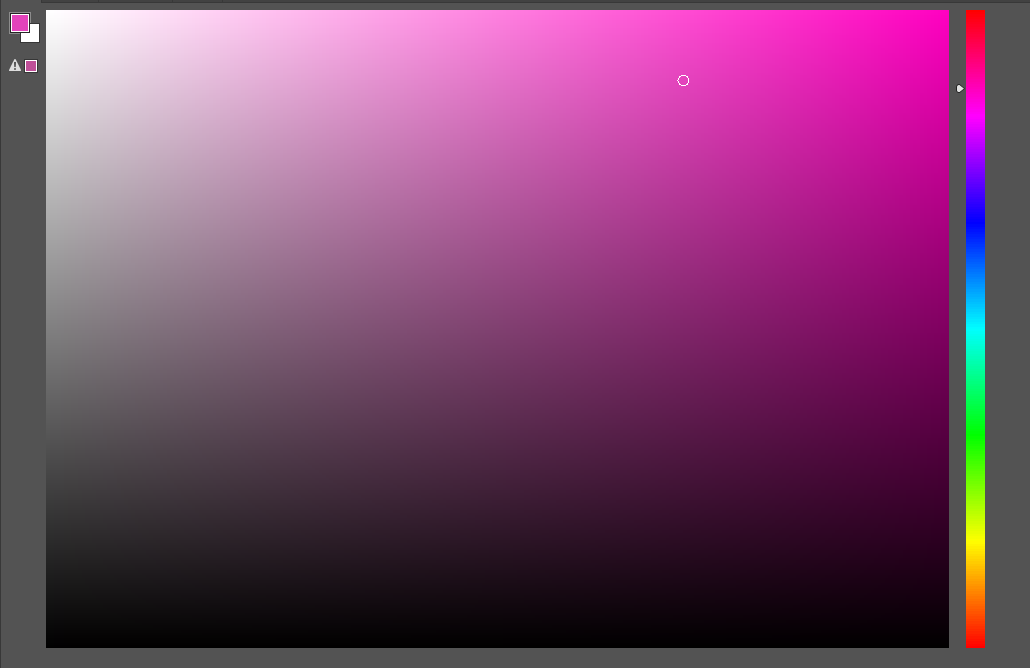
この「よくある」カラーピッカーは,左の明度と彩度の領域が \([0,1]^2\) の空間を持っていて,右の色相の部分が \(S^1\) ……のはずですが,実装の都合で \([0,1]\) の空間を持っています。
それに対し,私はこんなカラーピッカーを作ってみました。
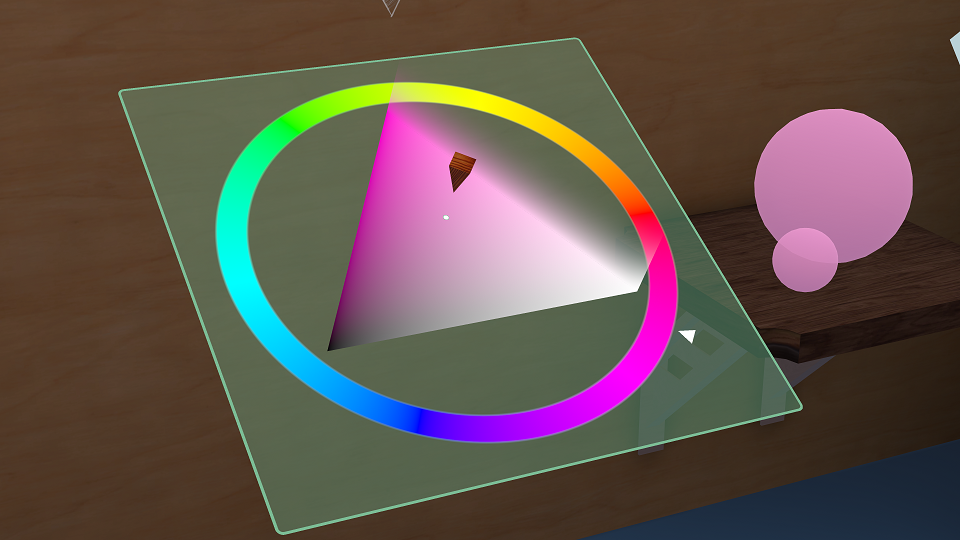
この中央の楔のような物体は,操作面に対して常に垂直になるように細工してあります。 ついでに,三角形の領域の外には持ち出せないようにしてあります。 このように,自由度を縛ることにより,対象の本質的な「形」を明確にできます。
この楔は,水平位置によって \(\left\lbrace \left( s,v \right) | s,v \in \left[ 0,1 \right] \land s \leq v \right\rbrace\) の情報が取れ,これが明度と彩度に対応します。 この領域が三角形であることは,明度が0の時に彩度が必ず0であることを反映しています。
さらに,楔の回転により色相を得られます。向く方向を固定されているので,当然 \(S^1\) の情報を得られますね。
ついでなので,楔の上下移動で透明度を指定できるようにしました。 楔の真下の位置には小さい点が表示されるので,今選んでいる色が分からなくなることはありません。
このように,制約が少ない世界では,より柔軟で本質的なUIを設計できるのです。
計算機と皮膚のインターフェース
ハードウェアについても,現状では視聴覚ばかりが実用化されているように見えます。
もちろん,研究室レベルでは触覚や嗅覚を刺激提示するデバイスをいくつも目にしました。 それらのデバイスが実用化されない理由には,もちろん安全性の保証や生産技術といった課題もあることでしょう。
例えば,触覚提示のうち昔から見られた物として「振動の提示」があります。 これ以外の提示が難しいという理由もあるとは思いますが,これ以外のハプティクスを目にする機会はとても少ないと感じます。
この状況では,触覚は「単音のみが鳴る音声」と同じ形をしています。でも,実際の触覚はこれよりも遥かに複雑な形をしています。 現状がなかなか進展しないのは,これ以上の新しい触覚の「形」を扱う方法について,まだ人類が思いついて合意できていないためだと思うのです。
ところで,振動の提示こそがハプティクスだという理解をしている方を複数見かけています。 たしかに現状ではそう理解されても問題はないですし,仕方のない事だと思います。
しかし,皮膚には主に4種類のセンサーがあります。
- 直流成分を検出して圧力を感じるメルケル細胞
- 低周波成分に反応してパタパタした振動を感じるマイスナー小体
- 高周波に反応して音叉に触れた時のような痺れるような振動を感じるパチニ小体
- 横ずれに応答するルフィニ終末
これらに対応させれば,例えば撫でるような感触であったり,トントンと気付かせるような「知らせ」の方法が取れます。けれど今しばらくは,計算機と皮膚のインターフェースがあまり綺麗に対応していない状態で,何らかの合意を取っていくしかないのでしょう。
一度取った合意を覆すのは,合意を取る以上に難しい行為です。
しかし,その対象の「形」を制約の中で常に問い続けることにより,より本質的で,より綺麗な存在が生まれ続けることを静かに願っています。
追伸
皮膚の触覚センサについて詳しめに書かれている資料を見つけましたので,ご参考までに。